Robotis Bioloid
Ниже приведён текст оригинальной статьи на тогда ещё Хабрахабре, сопровождавшей эти короткие фильмы.
There are no restriction on the robot, except that it may have no weapons or projectiles
(Цитата из правил Humanoid Freestyle соревнований RoboGames)
Сегодняшняя робо-сцена представляет из себя удивительное зрелище. Она похожа на то, как выглядел мир в эпоху Homebrew Computer Club и коробочек для обмана телефонных компаний за авторством двух Стивов.
В то время, как в Америке проходило крупнейшее в мире событие из мира хоббийных роботов, в Москве в моих руках оказался на тестировании один из самых популярных робо-китов в мире, Bioloid корейской компании Robotis.
Робо-кит это набор для создания робота. Стоящие в иерархии сцены хоть и ниже самодельных контроллеров, самовыпиленных алюминиевых профилей и самоподобранных сервоприводов, китовые роботы ценятся гораздо выше майндштормсов и ардуин с колёсиками. Стандарные классы гуманоидных роботов в соревнованиях (вроде вышеупомянутого RoboGames или японского RoboOne) имеют правила, в которые легко вписываются киты и категории, специально созданные для китовых роботов. За хорошее сочетание цена-качество, лёгкость в сборке и главное — лёгкость в модификации киты очень популярны среди энтузиастов-робототехников.

(Robonova, Bioloid, Kondo)
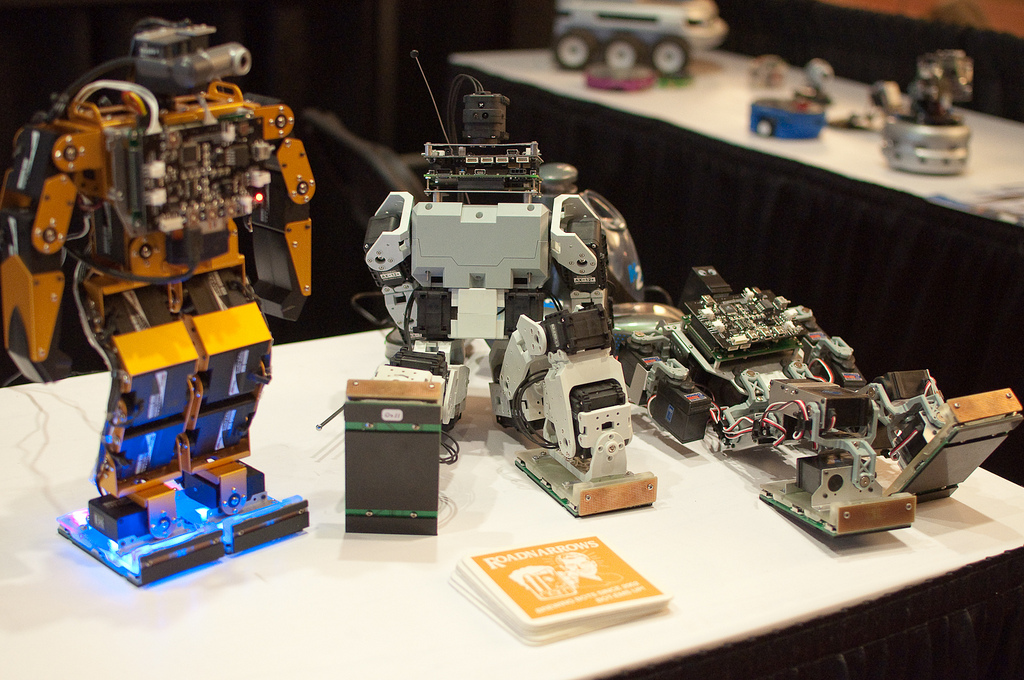
Bioloid не является главным китом на гуманоидной сцене, преимущественно занятой японским Kondo KHR. Но в родной Корее он называется национальным учебным роботом и очень там любим. К тому же в отличие от Kondo KHR и прочих японских китов, Bioloid доступен по всему миру.
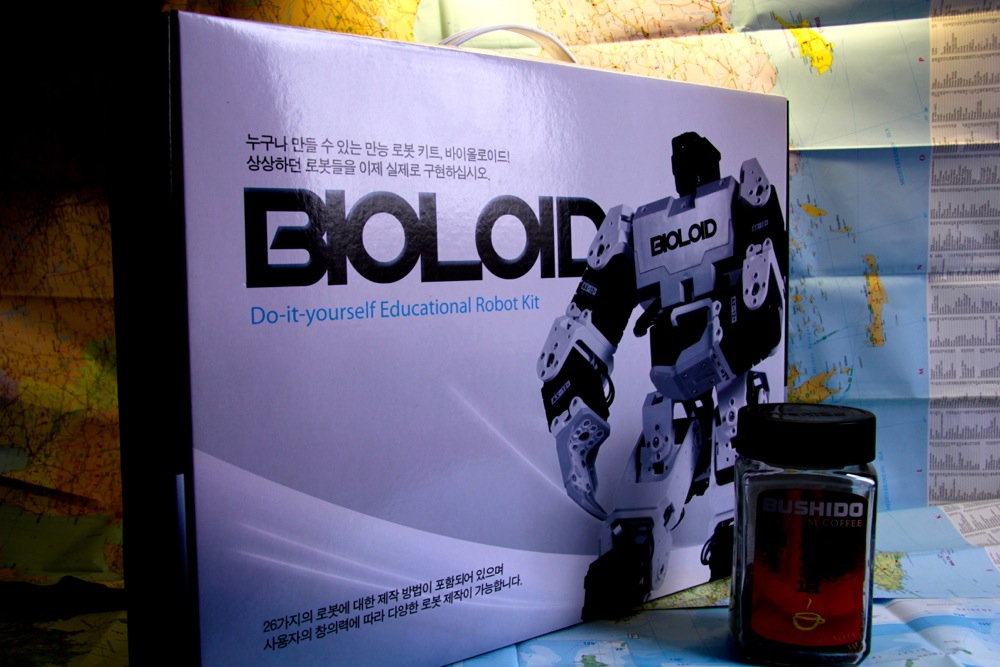
Bioloid по комплектации делится на три модели, Beginner, Comprehensive и Advanced. (Существуют ещё всякие учебные и спортивные версии, не появляющиеся вне Кореи). Beginner содержит всего лишь 4 сервопривода и рассчитан на знакомство с китом, Comprehensive и Advanced включают 18. Ровно 18 нужно для постройки гуманоидного робота. Advanced имеет всякие плюшки вроде уже готовой поддержки дистанционного управления и стильной лицевой панели. В руках у меня был Comprehensive.

Коробка от кита внушительна, с одной стороны на ней изображена вершина того, что можно собрать по инструкции — гуманоидный робот, с другой — несколько роботов попроще.
Особенность Биолоида (и это главное его отличие от большинства китов) — возможность собрать не только гуманоидного робота. Кит даёт неограниченный простор для творчества. В инструкции к Comprehensive есть с десяток роботов и ничто не мешает строить свои (что и делают робототехники, выходящие с китом на соревнования).
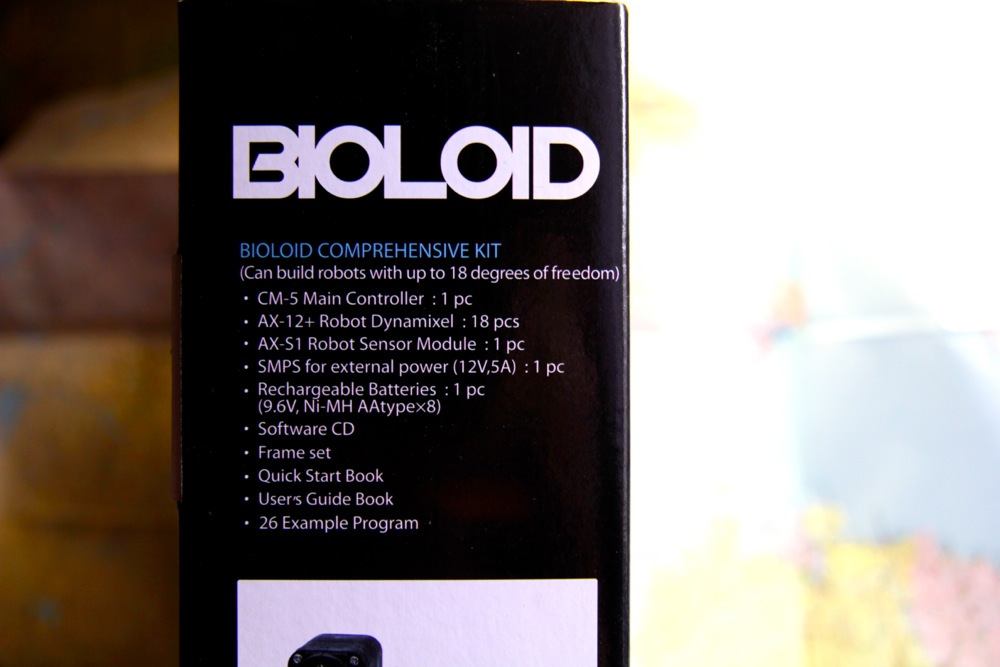
Сверху коробки обозначена модель комплектных сервоприводов, сбоку — краткие характеристики кита.

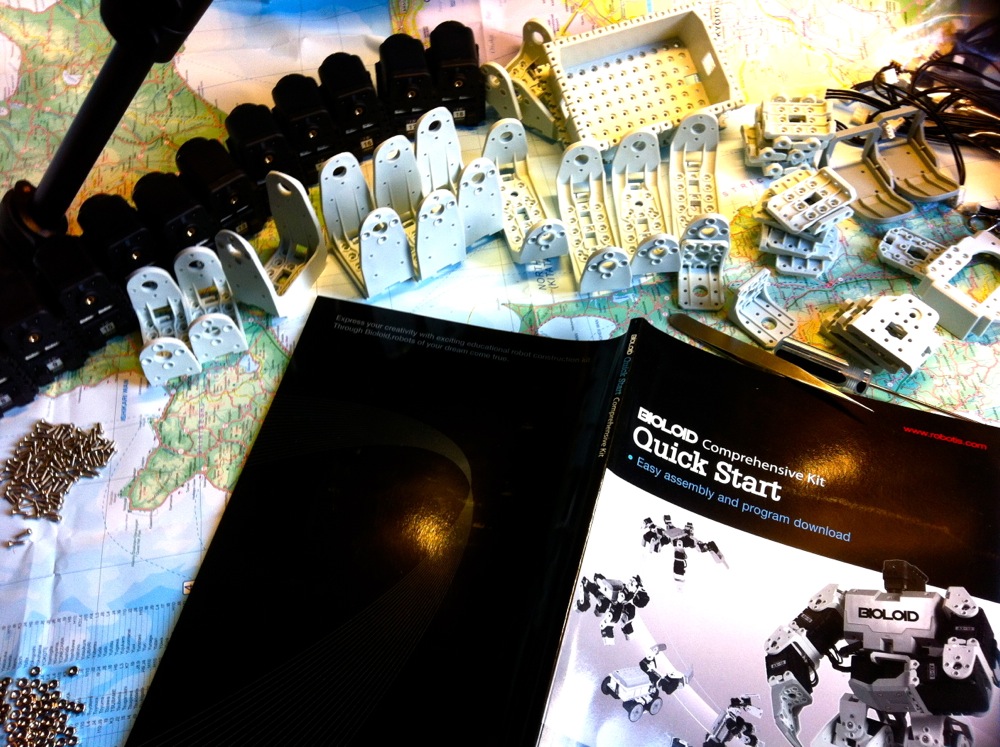
В комплекте идёт две инструкции, диск с софтом и в моём случае листочек с объяснением разницы между сервоприводами AX-12A—AX-12+ и AX18A—AX-18+ (полезно для тех кто с прошлой моделью работал).
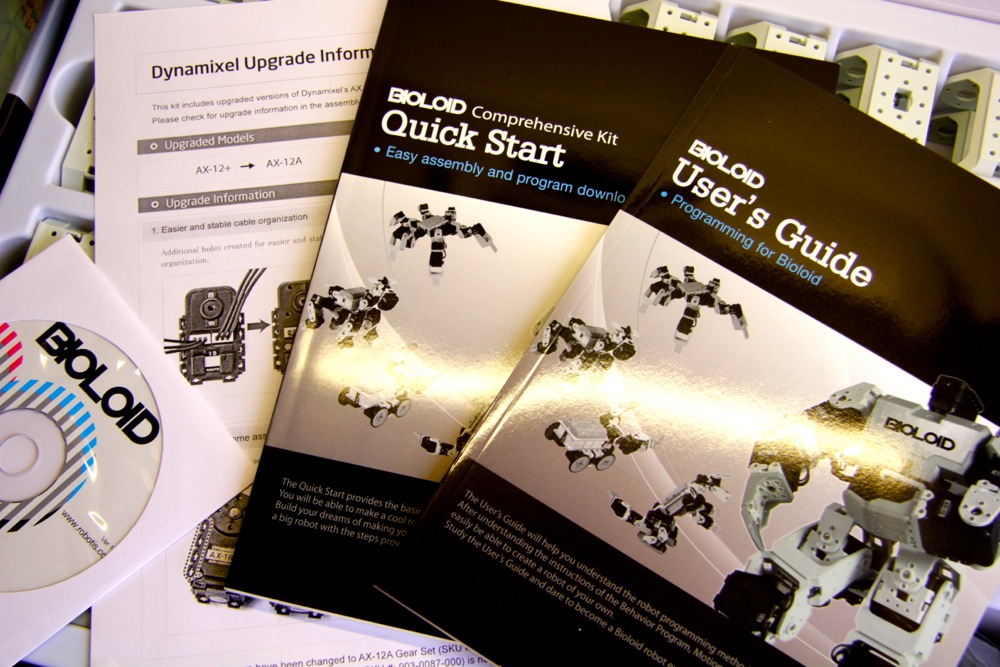
Quick Start содержит схемы для сборки различных роботов, User’s Guide является мануалом к кодингу робота.

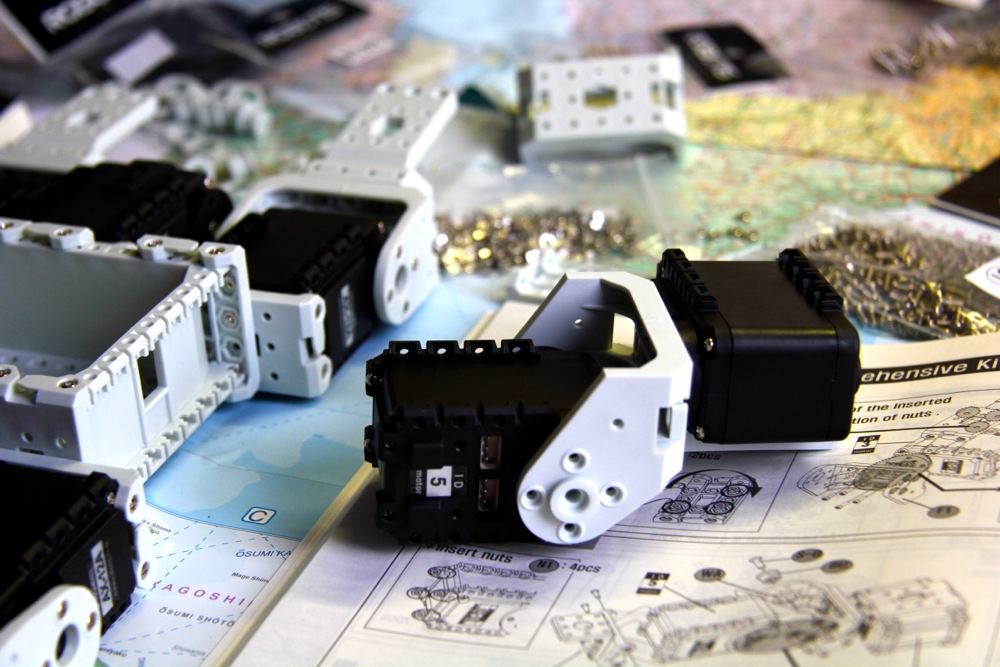
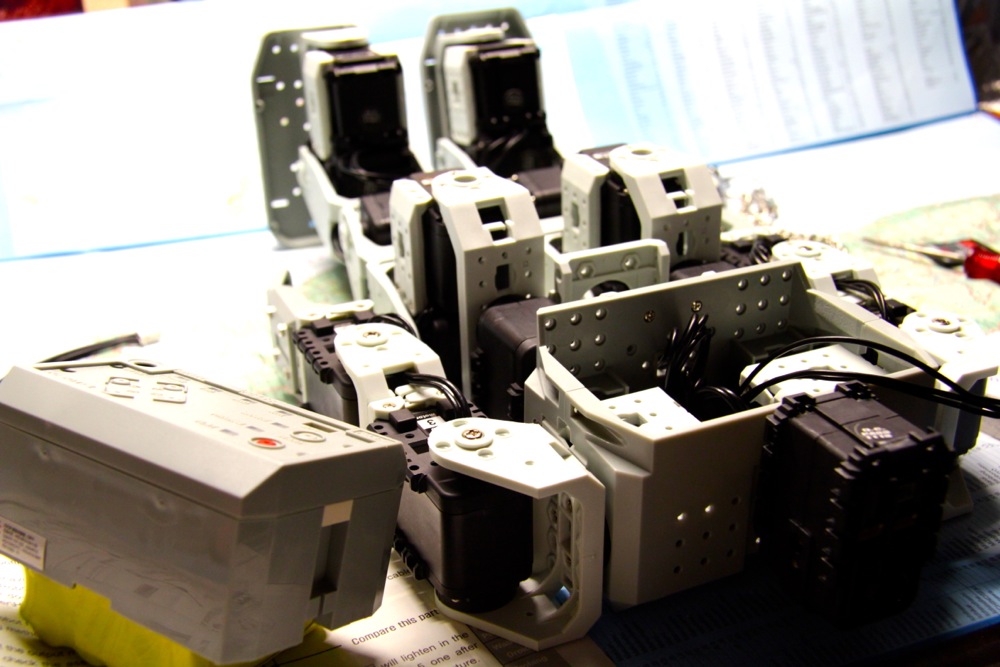
Больше всего места в коробке занимают различные крепления из которых и строится скелет робота.

Не меньше в комплекте и всяческих метизов.

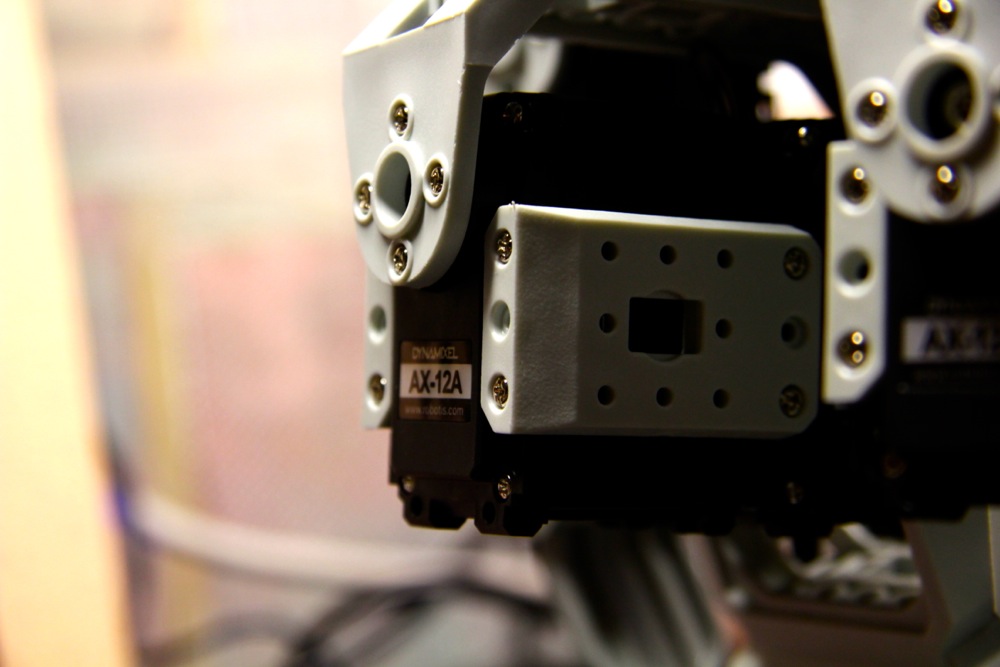
Сервоприводы, поставляемые с роботом — Dynamixel AX-12A (недодаташит). Добротные робо-сервы. Шумноваты разве что.

Восемнадцать штук. Девятнадцатая коробочка, мимикрирующая под серв — Dynamixel AX-S1 «Интегрированный сенсор». Интересная пепяка, включает в себя три датчика расстояния (инфракрасные), микрофон, IR-приёмник и пищалку. Несёт ID номер 100. (недодаташит)


Dynamixel AX-12A и два китайских хоббийных серва.

Поясню отличие робо-сервов от хоббийных сервов. Хоббийные сервоприводы не дают фидбека, понять на какой градус повёрнут серв невозможно. Робо-сервы лишены этого недостатка. А ещё имеют большую точность чем хоббийные и такую вкусность, как умный контроллер, который позволяет различать сервы и цеплять их последовательно без необходимости тыкать каждый в контроллер. (Именно для этого на каждом серве указан ID).
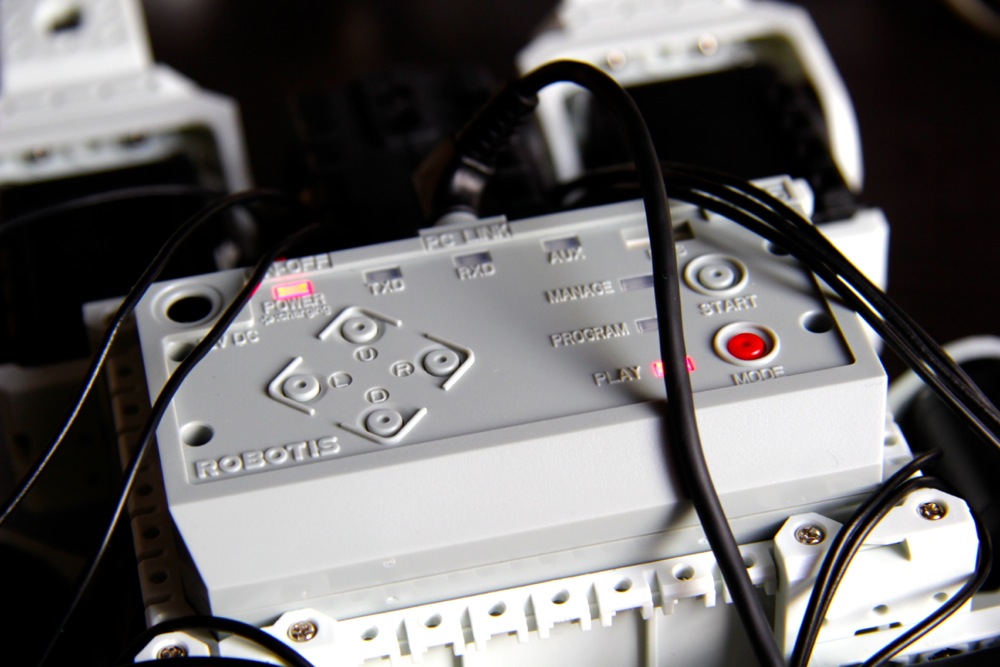
Контроллер в Basic и Comprehensive — CM-5 (недодаташит). Это такая умная 128ая АТмега с обвесом, что должно обрадовать любителей микрух, её ж можно перепрошить на что угодно.

Долой теорию. Первым было решено собрать Intermidiate-робота, «Spider», гексапода с 8 точками свободы (8 сервоприводов).

Инструкция по сборке приятная, почему-то напоминает инструкции к старым принтерам и материнкам. В схемах не удалось заметить существенных технических ошибок. Есть места с опечатками в текстах, кривой типографией и даже корейскими буквами из оригинального мануала, но сами схемы читаются.
Собирается робот на удивление легко. Требуется лишь одна отвёртка, хотя с пинцетом удобнее закреплять мелкие гайки. Есть странные решения вроде крепления гаек в труднодоступных местах наклейками, но общее впечатление от процедуры сборки положительное. Закончен паук был за полтора часа. И от самого процесса можно получить немало удовольствия.
После сборки существо требует загрузки знаний в свой кремниевый мозг.
CM-5 не имеет на себе любимого в ардуинах USB-интерфейса. Переходник имеется только в Advanced версии, поэтому обладатели новых компьютеров и ноутбуков в пролёте. Переходник из запасов сгорел, поэтому пришлось обратиться к резервной машине. На ней есть два свежих сочни компорта и винда. Самое то.
Подробнее про винду. Дефолтный софт имеет версию лишь под Windows, что тоже погружает в печаль линуксоидов и маководов. Ввиду отсутствия компортов на своих лин- и мак- машинах не стал пытаться запустить софт через вайн, но есть подозрения, что не очень-то он и заработает.


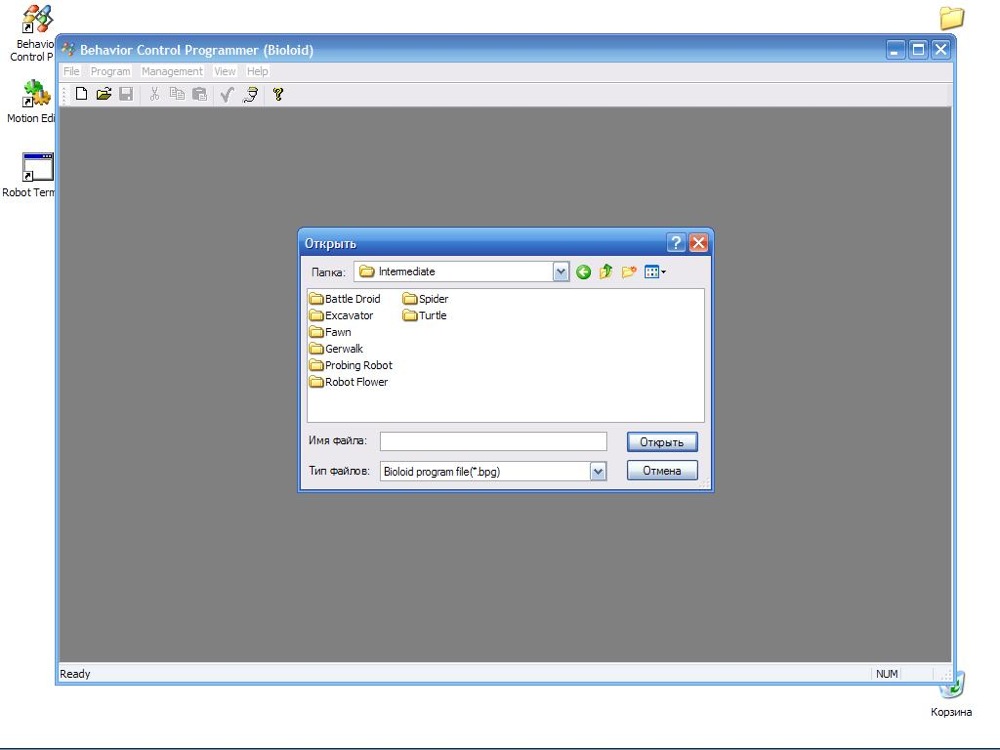
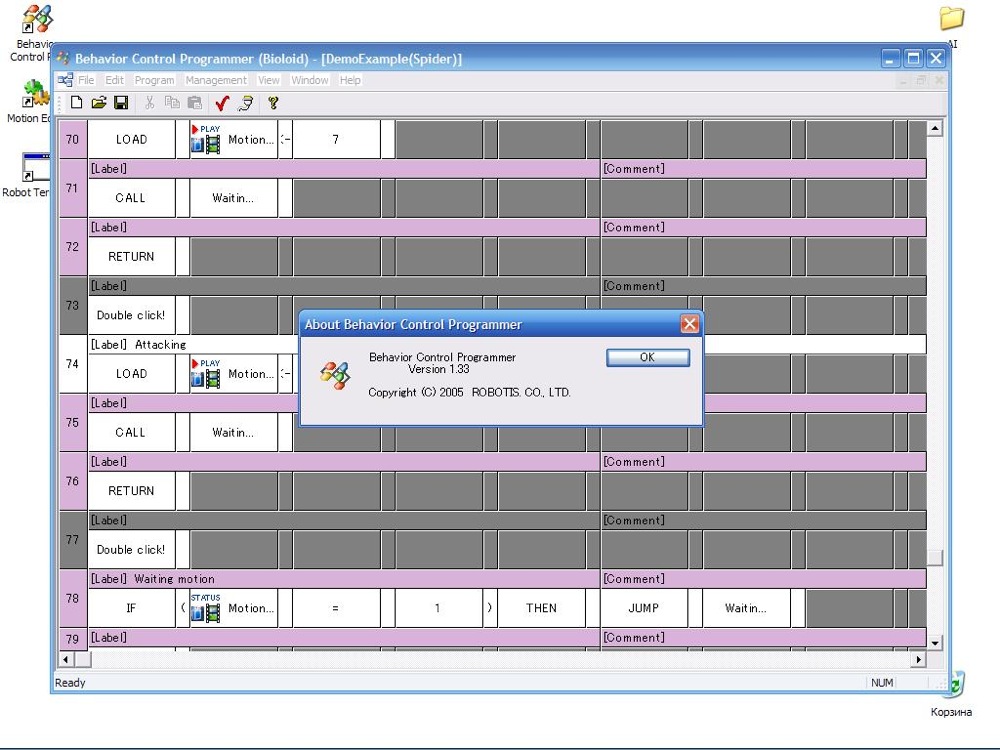
На компьютер устанавливается три приложения: Behavior Control Programmer, Motion Control и Robot Terminal.
Behavior Control Programmer является средой для написания кода для робота, только код этот пишется щелчком мышкой по квадратикам. Возможно и весело.
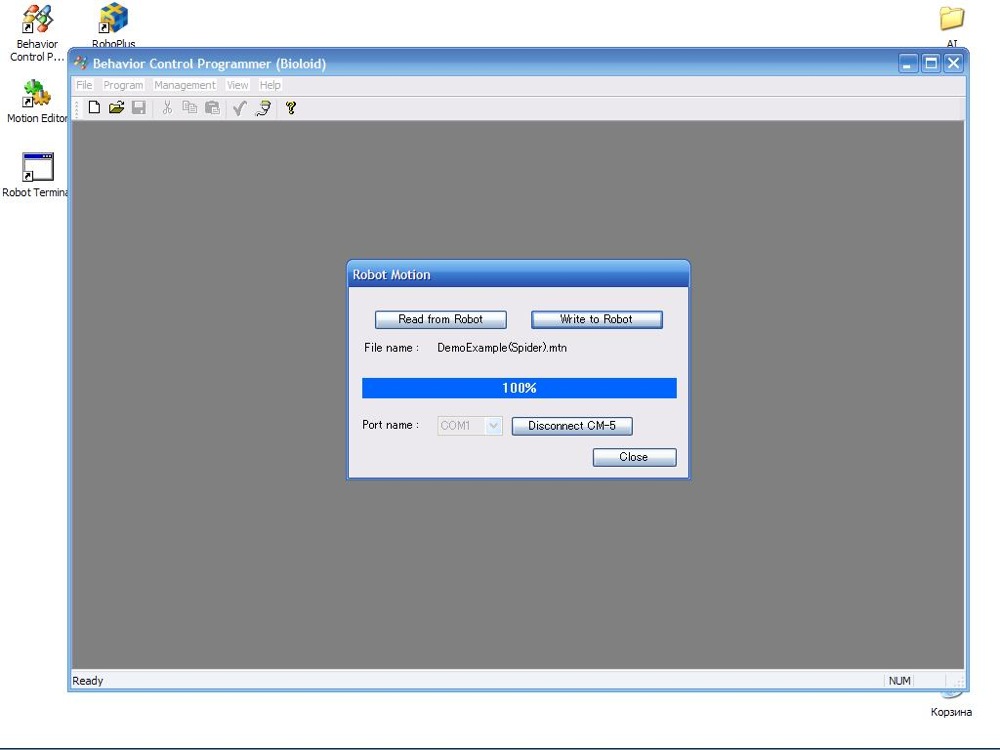
Из неё же на робота загружается файл «поведения» (тот самый код) и файлы «движения».

Послее загрузки проверочного файла по нажатии на одну из кнопок контроллера, а их там четыре — U,D,L,R (ещё есть MODE и START, но оно по другому профилю) последовательно загораются диоды на каждом приводе, это позволяет понять, правильно ли они установлены.


На диске есть ещё ролики с записями того, как должны работать роботы при правильной сборке и загрузке кода.

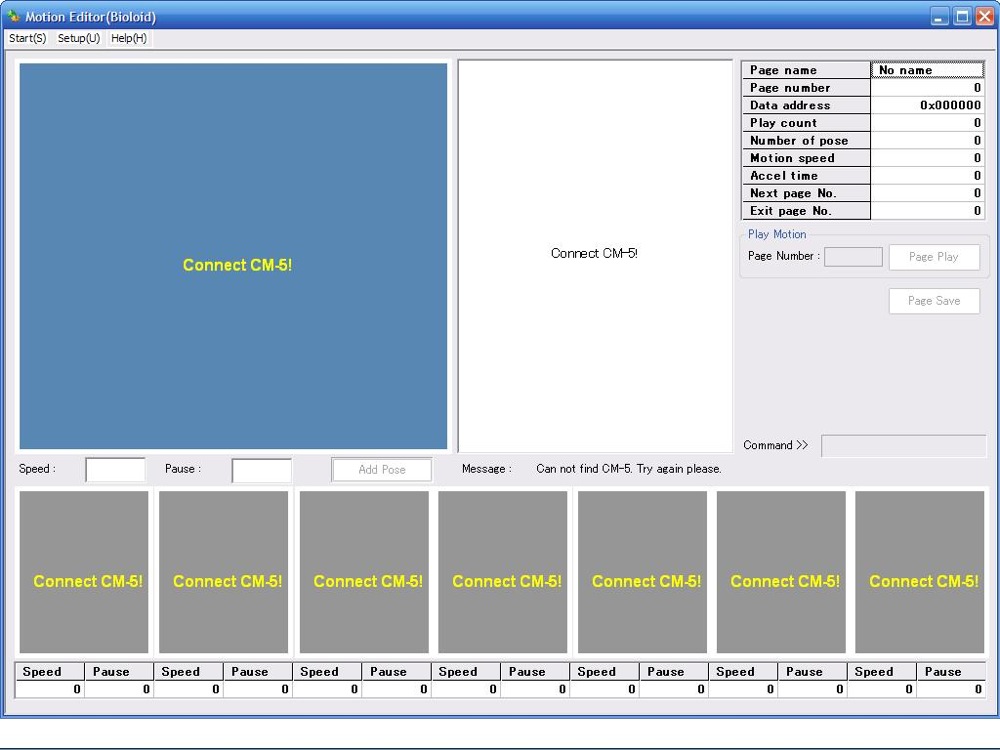
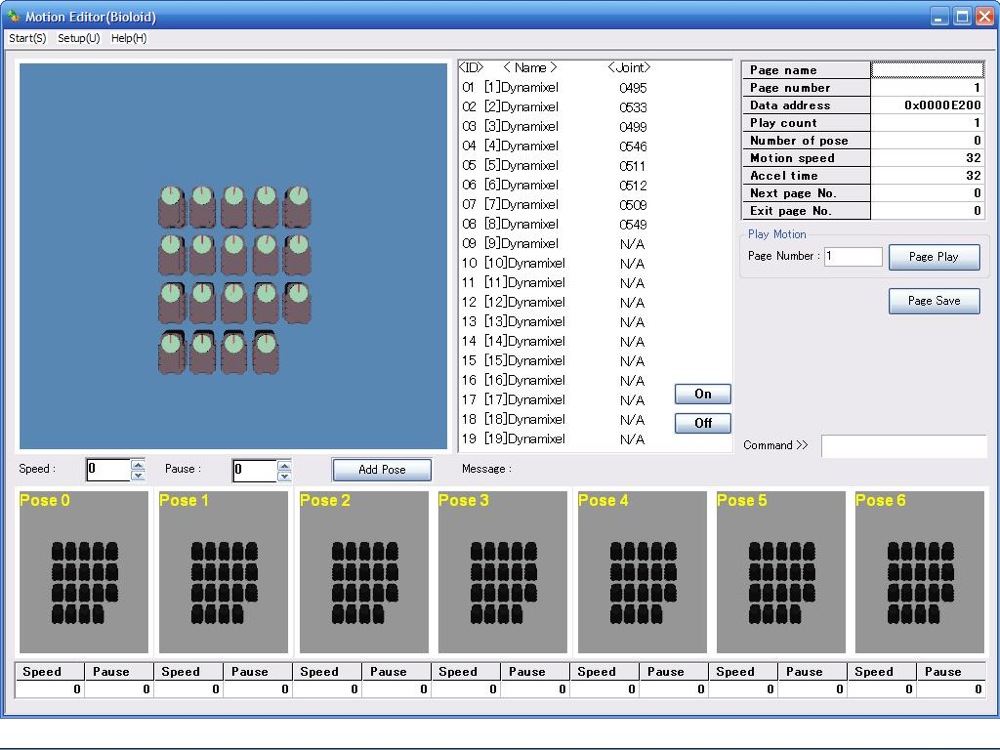
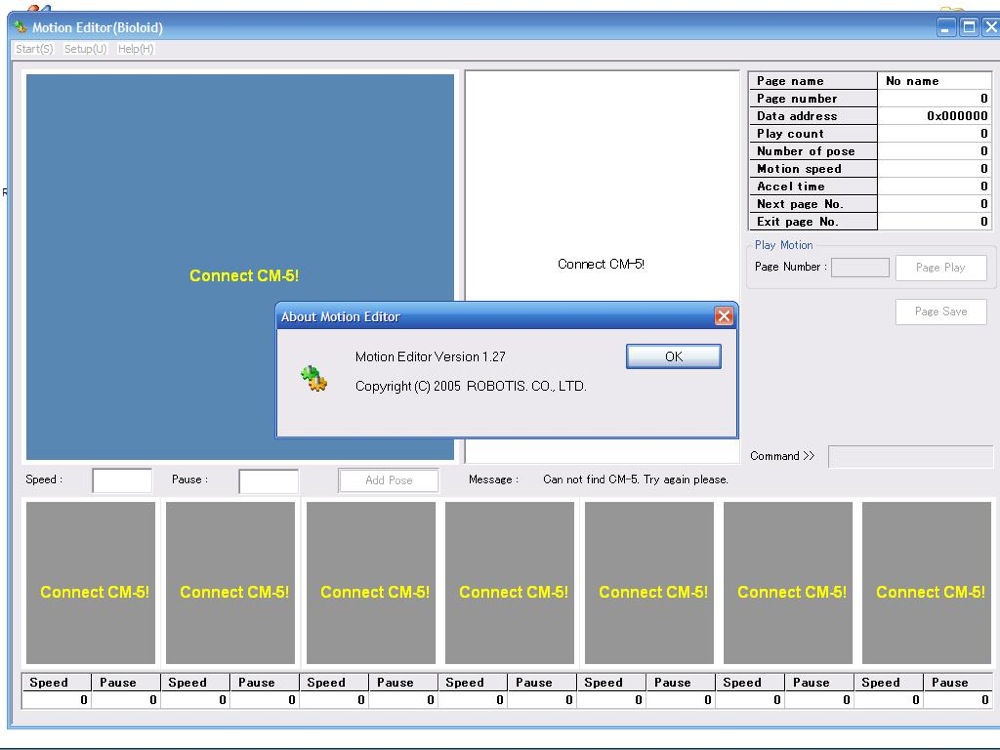
Движением заведует вторая софтина, Motion Control. Зачем оно нужно. В коде «поведения» можно напрямую задавать сервам угол поворота, однако это неудобно, когда сервов уже больше пяти, сложные движения становятся нагромождением чисел. Motion control позволяет делать пресеты движений, причем не только числовым вводом значений, но и захватом значений с робота. Пример — повернули манипулятор, сохранили значения, при повторе жеста робот так же поверёт манипулятор. Декоративная, но приятная фича — трёхмерная моделька робота. Есть для большинства роботов из инструкции.

Третья софтина — Robot Terminal и этим всё сказано. Слушает порт и даёт в него писать.

Версии в комплекте — древние. Bioloid пережил уже несколько поколений Kondo KHR, подвергаясь модификациям, конечно. Биолоиду уже семь лет, первые модели появились в далёком 2005. Софт из того времени.
Однако есть обновлённый софт, объединённая софтина RoboPlus. Но для совместимости с ней надо перепрошить CM-5, что делать было очень лень.

Тем не менее, вот RoboPlus. Помимо Биолоида он умеет работать с «детским» китом OLLO.
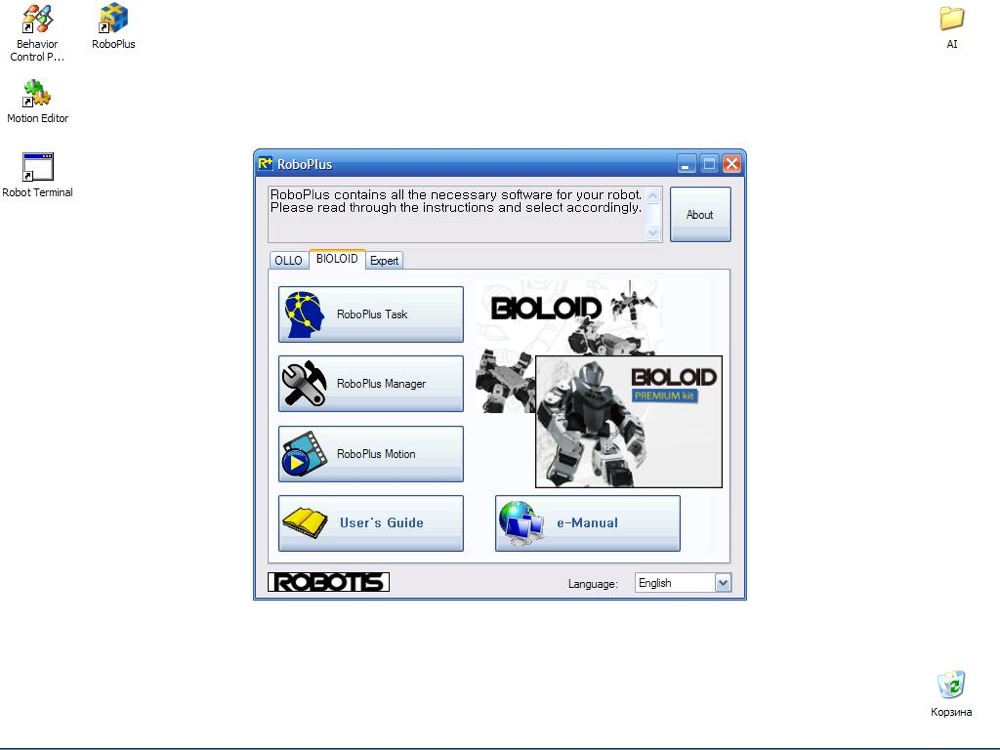
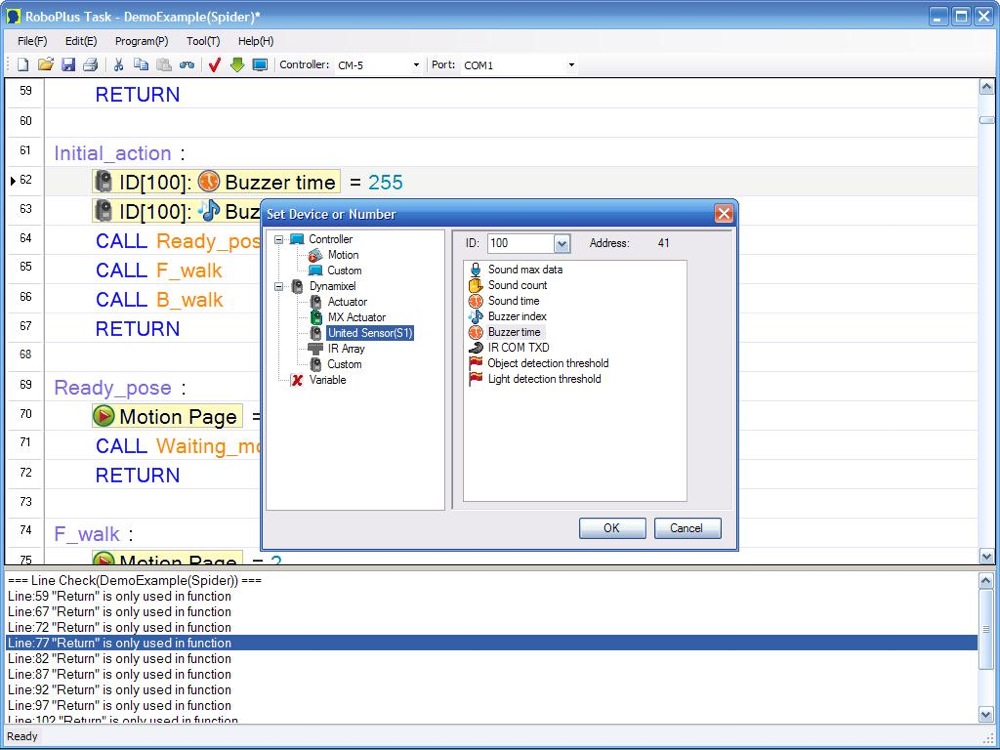
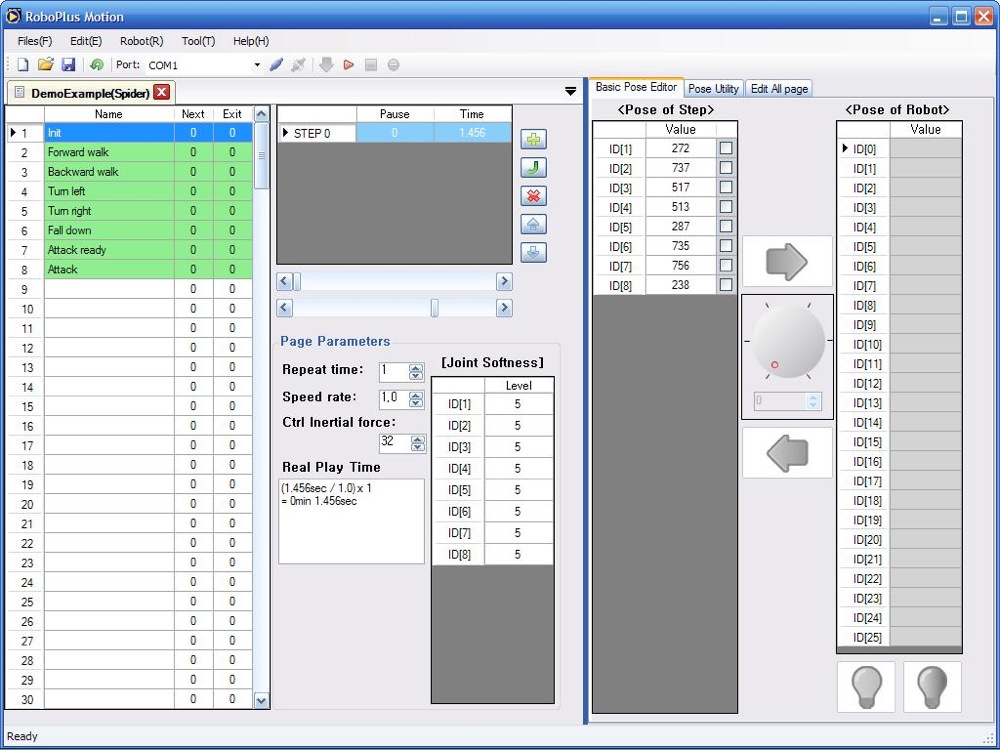
Behavior Control заменяет RoboPlus Task и получившийся результат уже выглядит неплохо.
Motion Control был заменён RoboPlus Motion. Второй выглядит гораздо более мощным и удобным, чем свой предшественник.
Только терминал не поменялся.
После загрузки дефолтного софта в паука он начинает бегать по столу с легко различимой логикой.

Двигаться в одну сторону, повернуться, двигаться в другую.

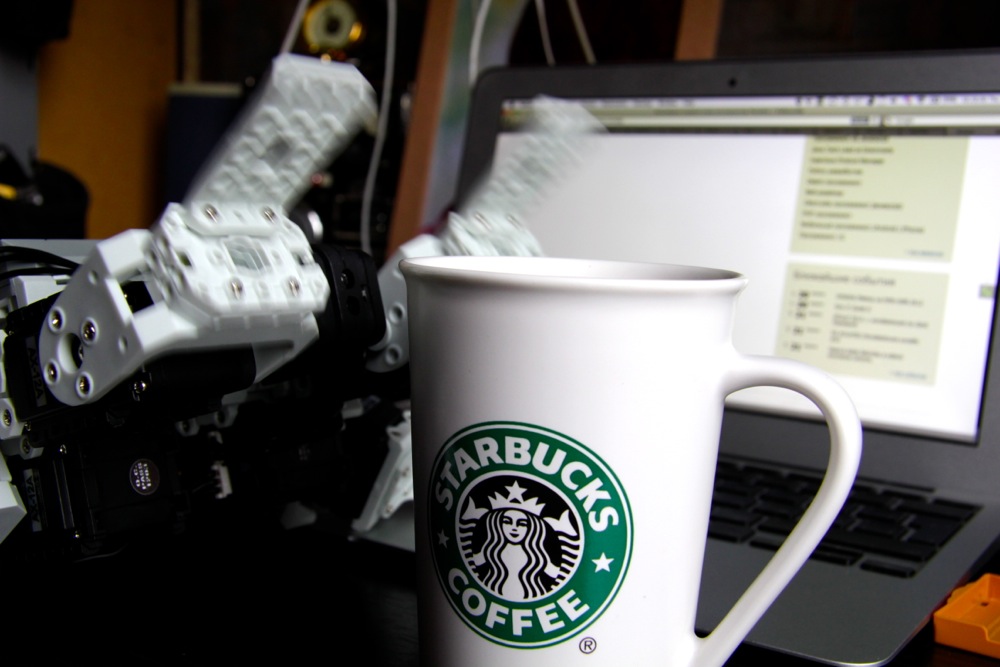
При нахождении врага по сенсору дальности…

(В данном случае — чашки)

Занять боевую позицию…

И атаковать!
Гиперкавай!

Ещё одна мимими фича, при обнаружении движения сверху он ложится. Этого нет на фото, но есть на видео.
Паук в сборе весит чуть более килограма, тяжелее всего, конечно, батарея. Пройдёт в лёгкие категории и без глубоких модификаций.

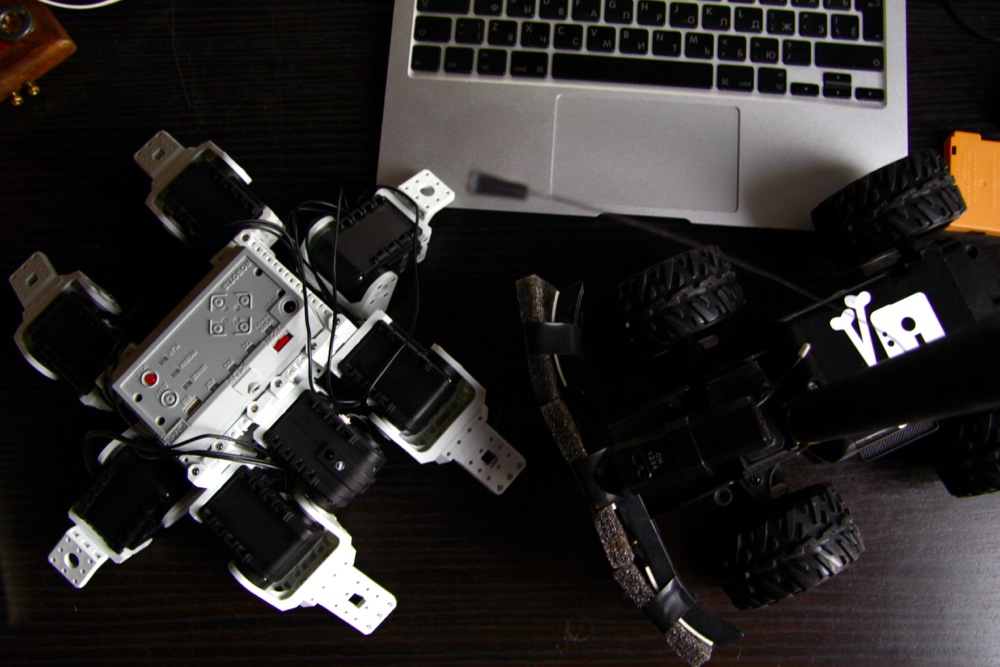
Bioloid в виде паука и самодельная телеуправляемая тележка Unokuroro. Похожи по размерам.
Маленькая деталь. При запуске робота идёт проверка всех сервоприводов, на каждом загорается диод. Красиво выглядит в темноте.

И наконец видео обо всём вышесказанном, сборка, загрузка кода и действие паука.
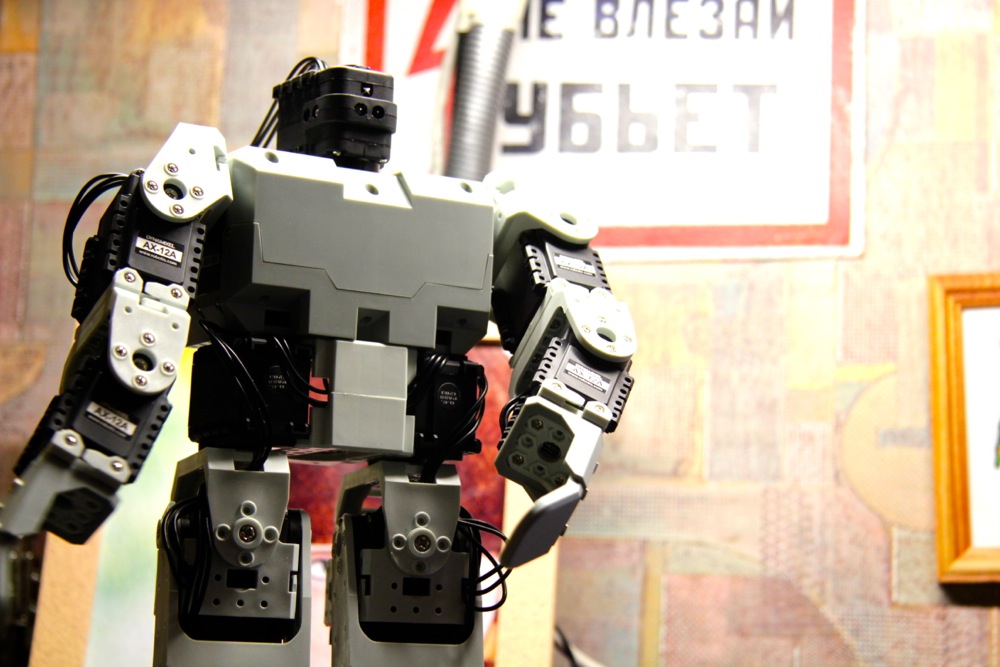
Долго возиться с пауком не хотелось, потому за полчаса он был разобран и началось его превращение в гуманоида, ultimate-форму Биолоида с восемнадцатью точками свободы.
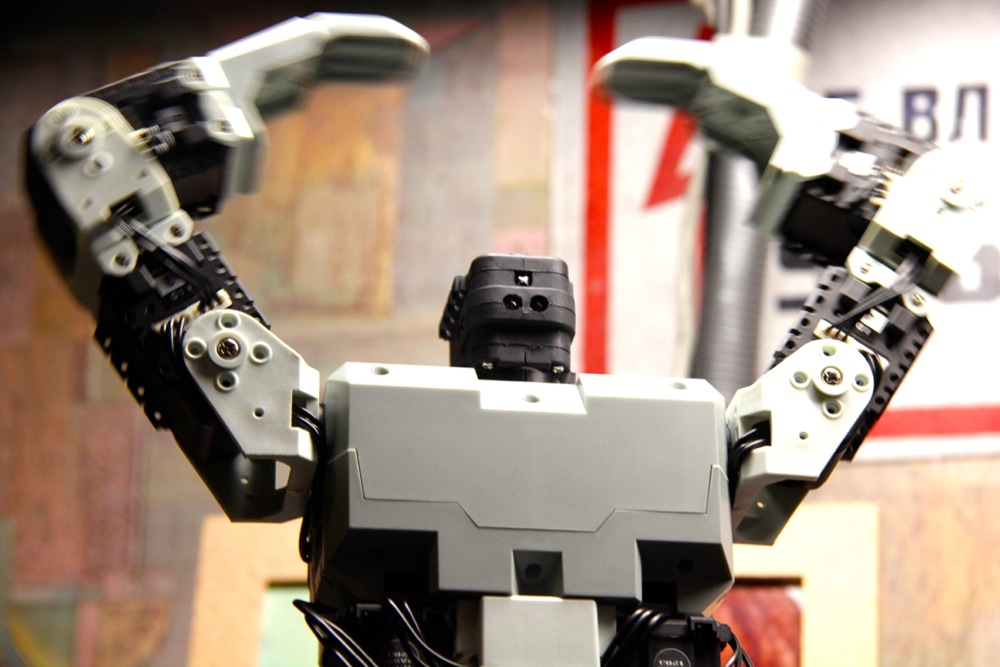
Гуманоидный робот, как и паук, собирается легко. Сначала получились ноги.

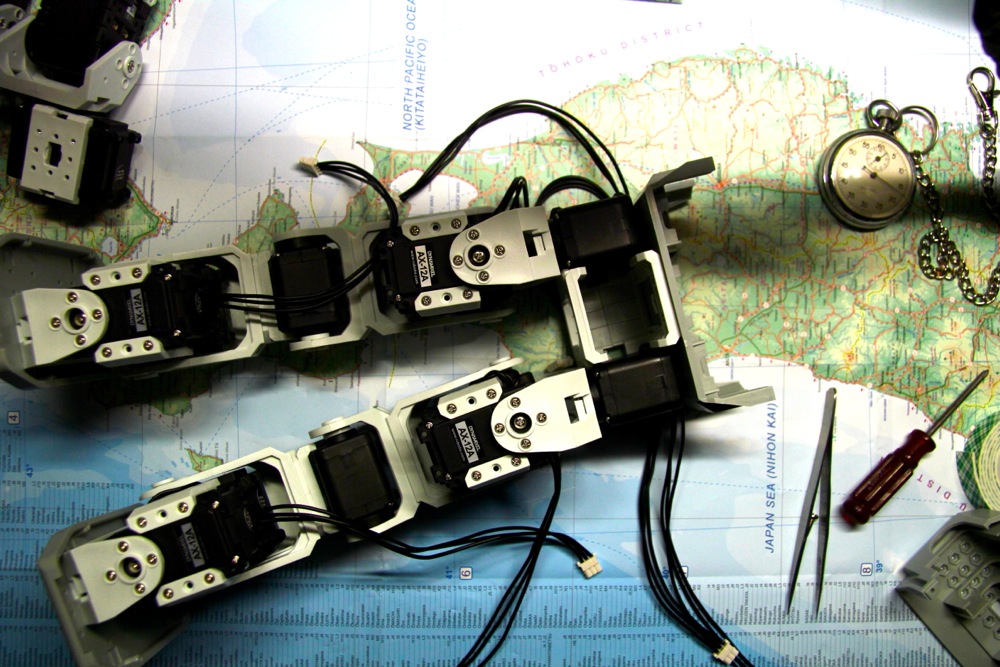
Между прочим для сборки необходимо 220 винтиков одного типа и ещё несколько десятков других. Так в инструкции указано.

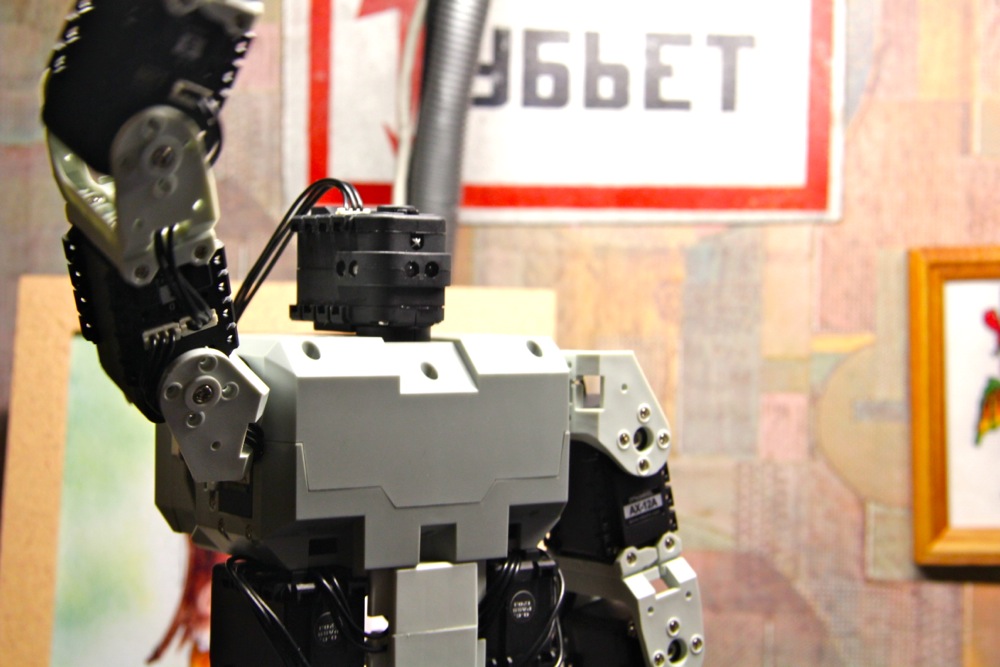
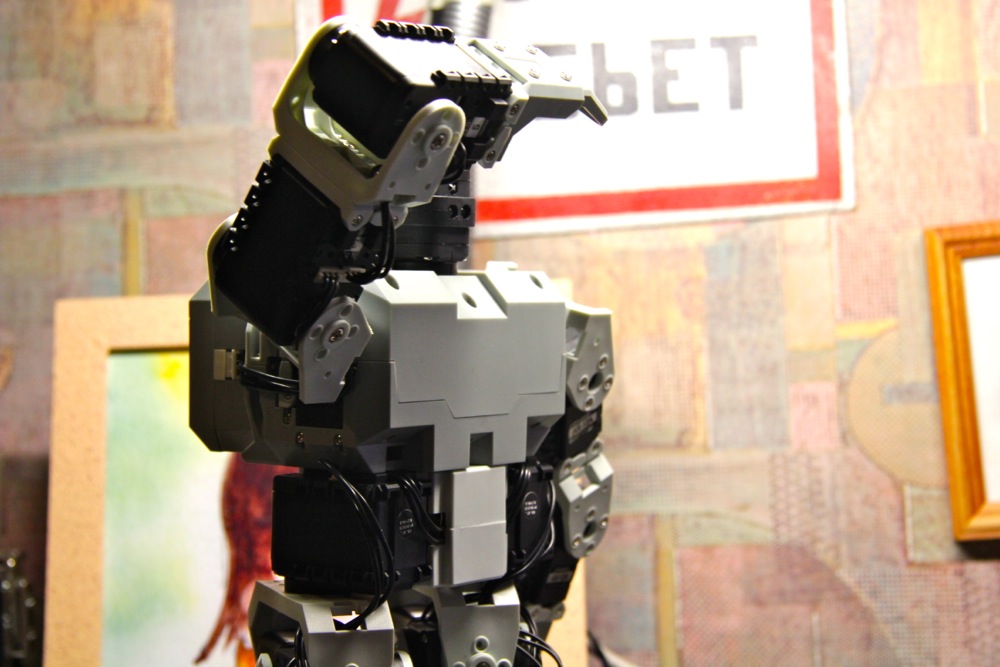
Потом верхние конечности.

Далее туловище.

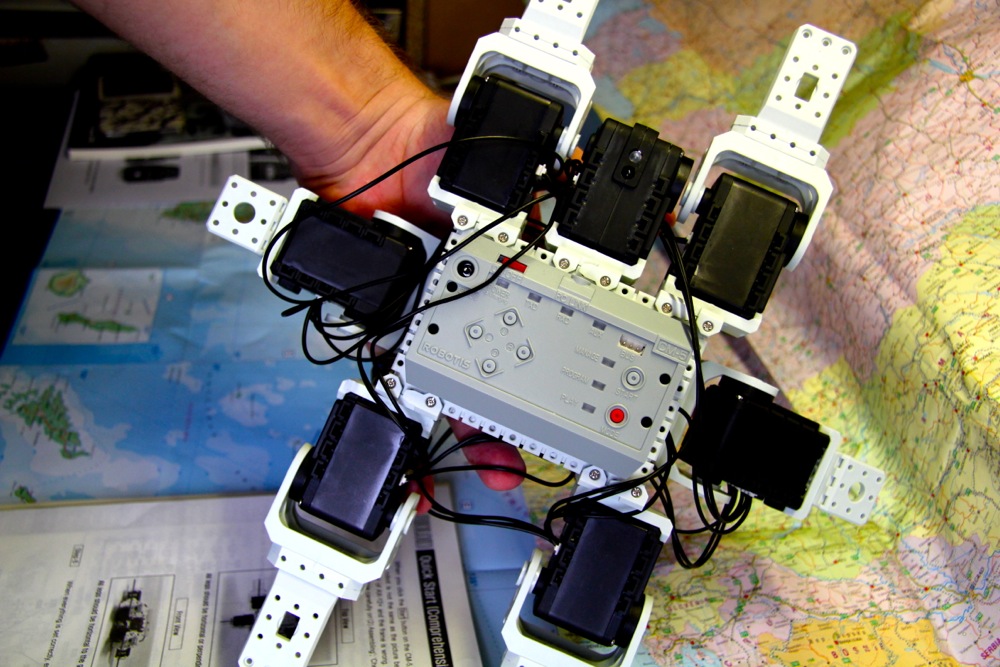
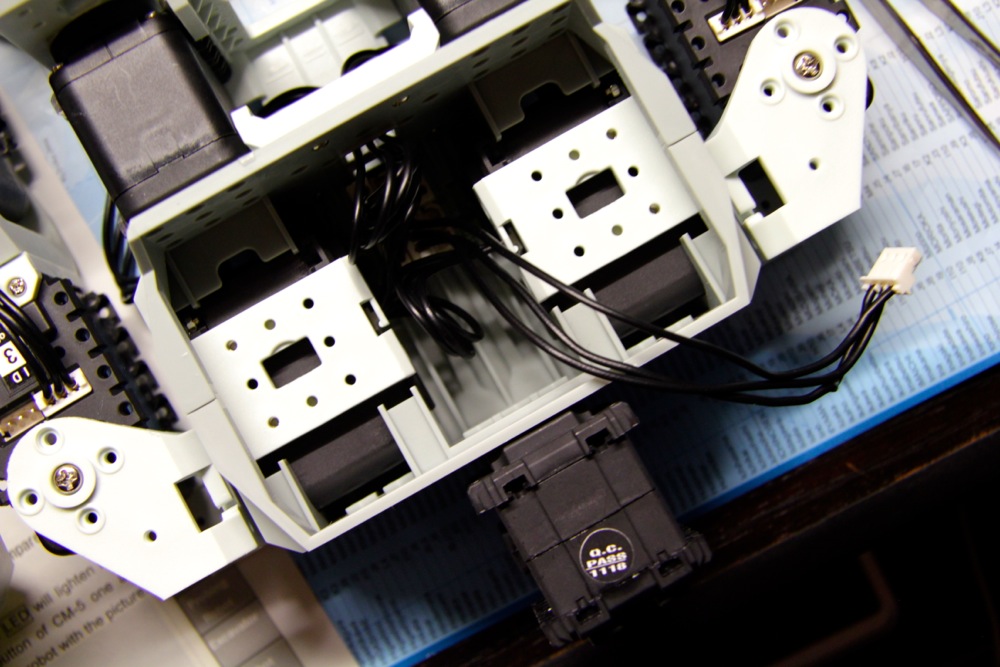
И соединить это всё вместе, а заодно провести кабели.
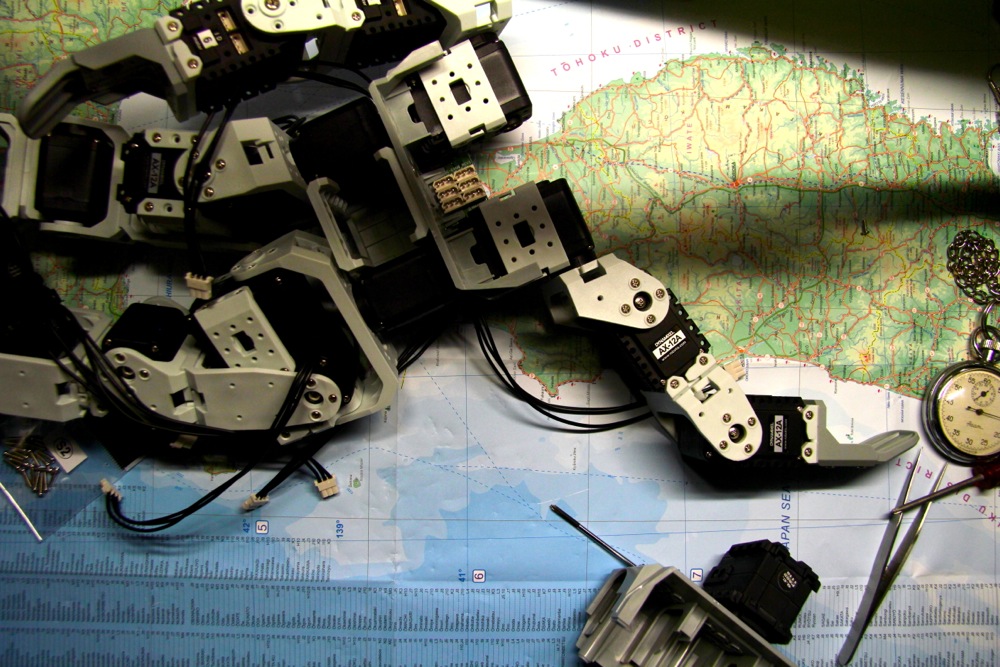


Приятная деталь — кит замечательно приспособлен к кабель-менеджменту, для этого в панельках сделаны специальные прорези и каналы.
Неприятная — к кабелям надо подходить аккуратно. Они покрыты мягкой изоляцией, которая очень легко сдирается о трущиеся части. Зато теперь известно, что внутри настоящий добротный медный провод.

Для гуманоидного робота необходима плата расширения сервов, которая есть в комплекте (кусочек текстолита с шестью серво-разъёмами).
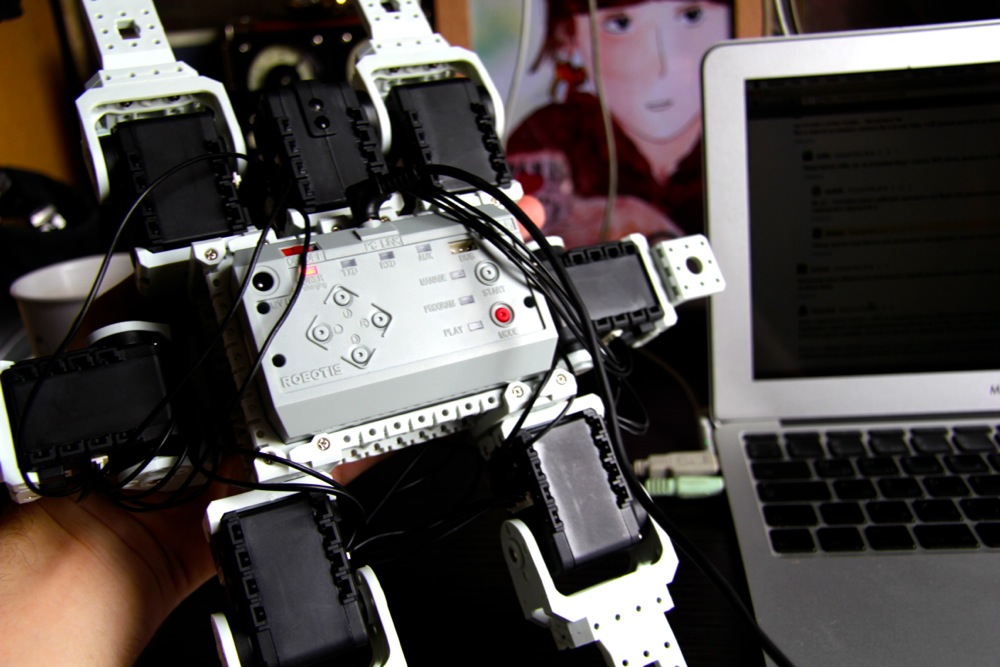
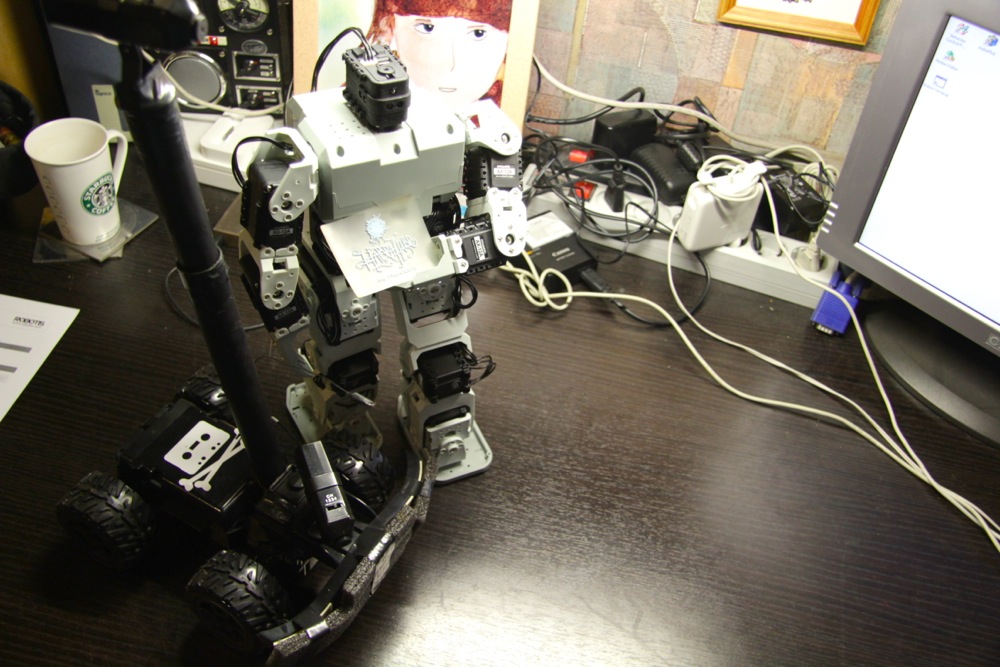
CM-5 крепится на спину роботу, подобно батареям ASIMO. Носить батареи в «рюкзаке» — удел всех современных гуманоидных роботов. Батарея у Биолоида мощная, 2Ач.
Сборка заняла около четырёх часов.
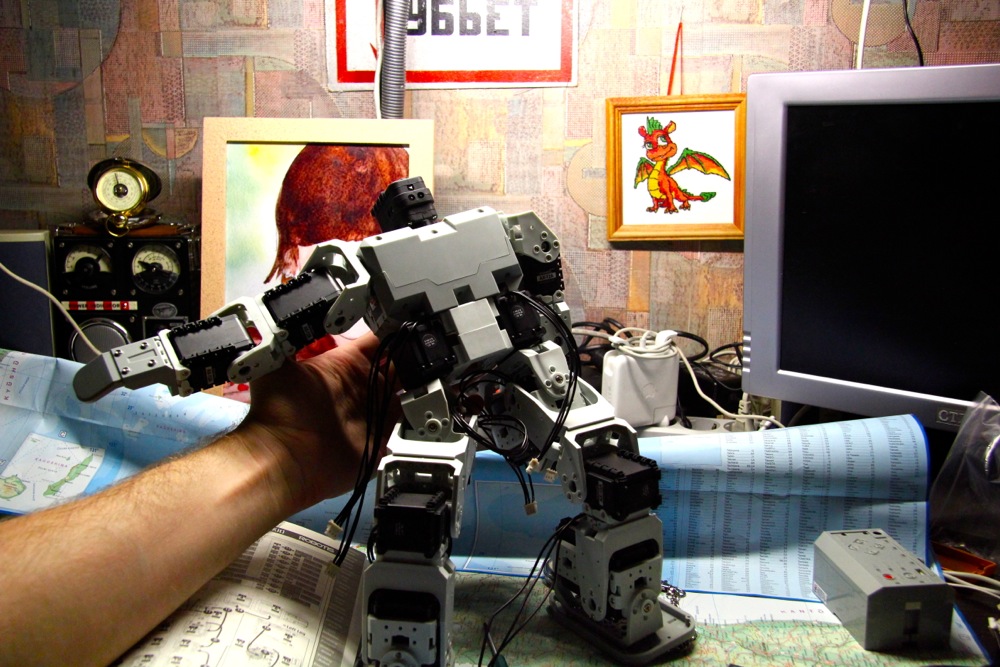
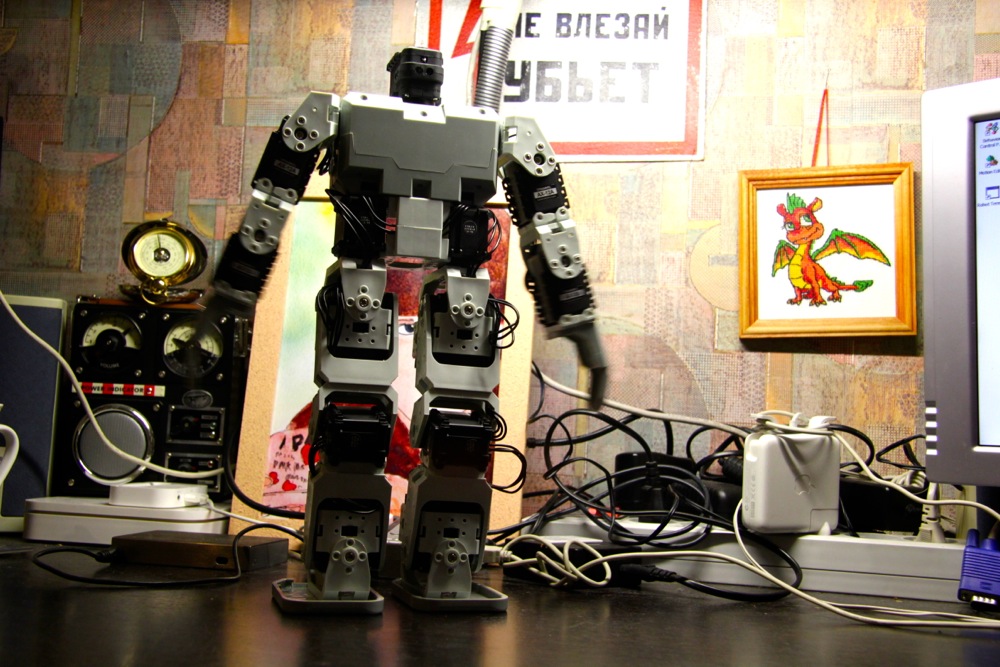
Bioloid в гуманоидной форме для масштаба с банкой кофе.

И с логотипом хабра, для суровости.

Биолоид и Унокуроро.

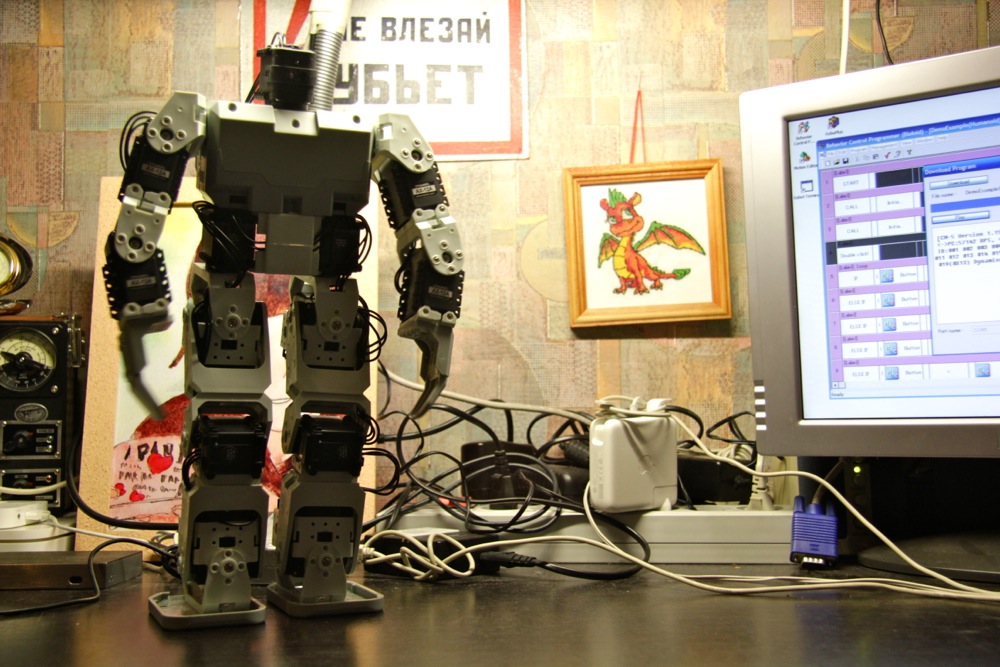
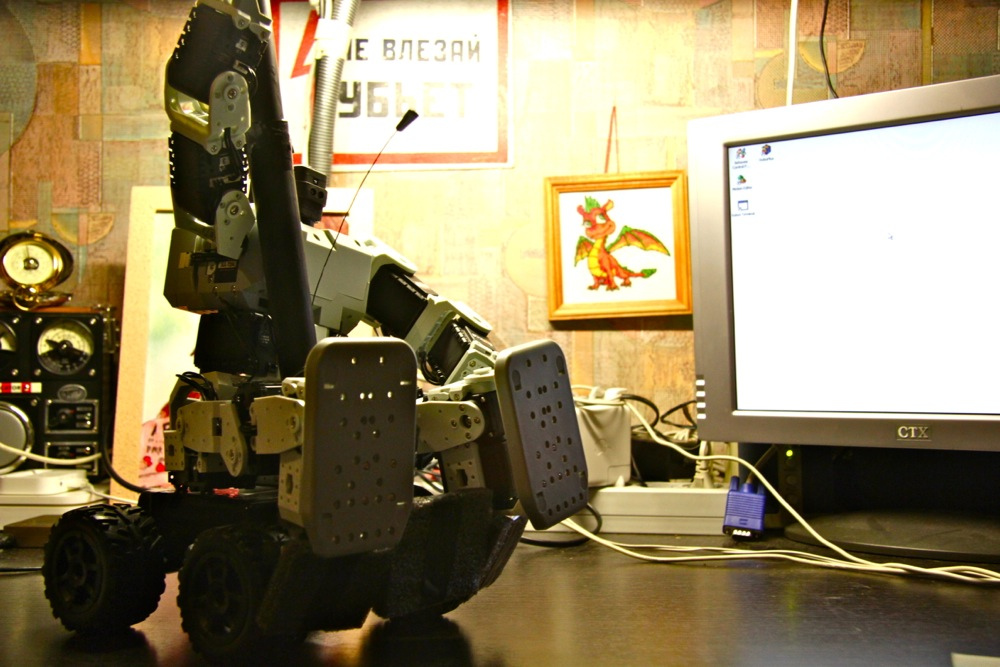
Снова софт. Текст — вывод из порта, он показывает, что сервы подключены правильно.
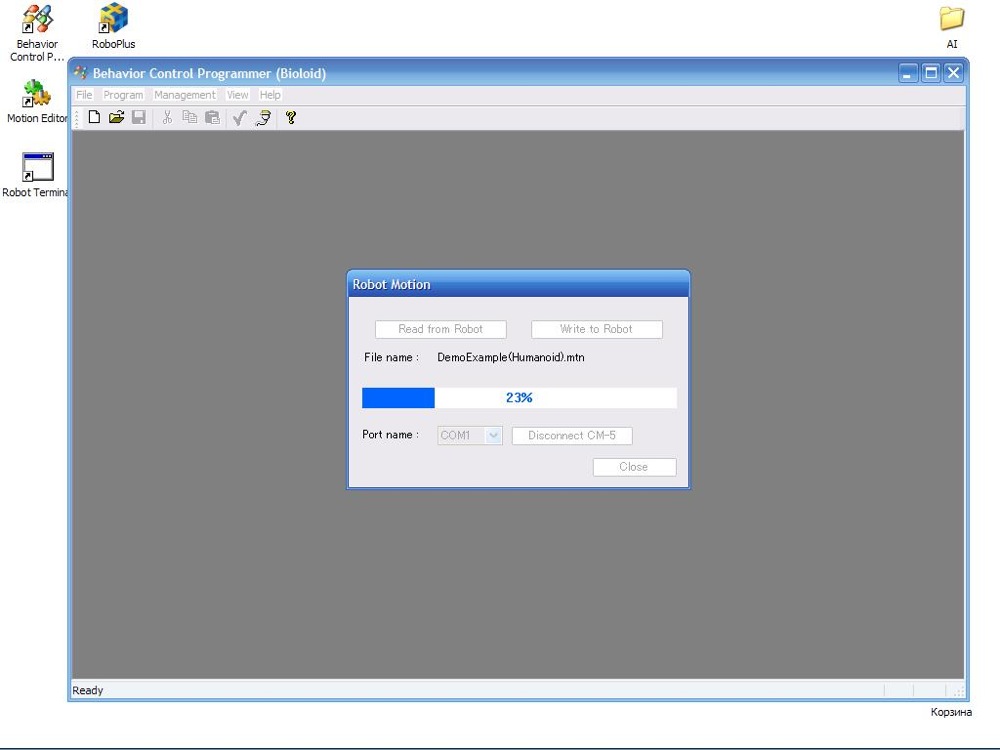
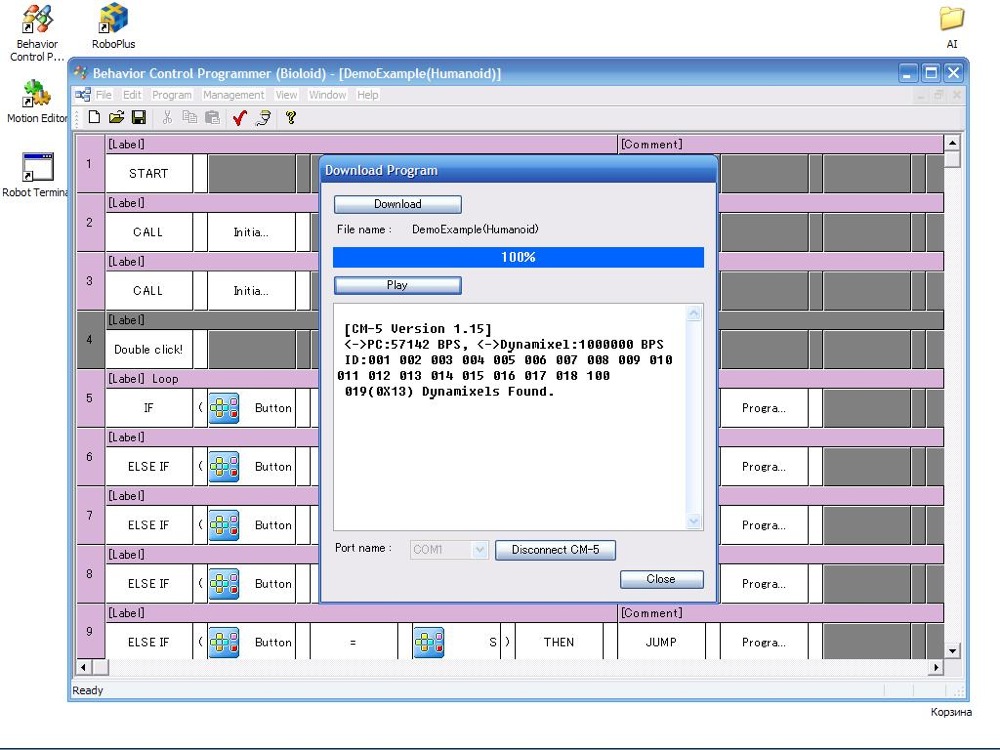
(На скриншоте то, как выглядит робот, сидящий на колене).

Гуманоид — самая популярная форма и «киллерфича» Биолоида, поэтому дефолтный код включает в себя аж несколько демок.

Самая первая демопрограмма — показ различных поз.


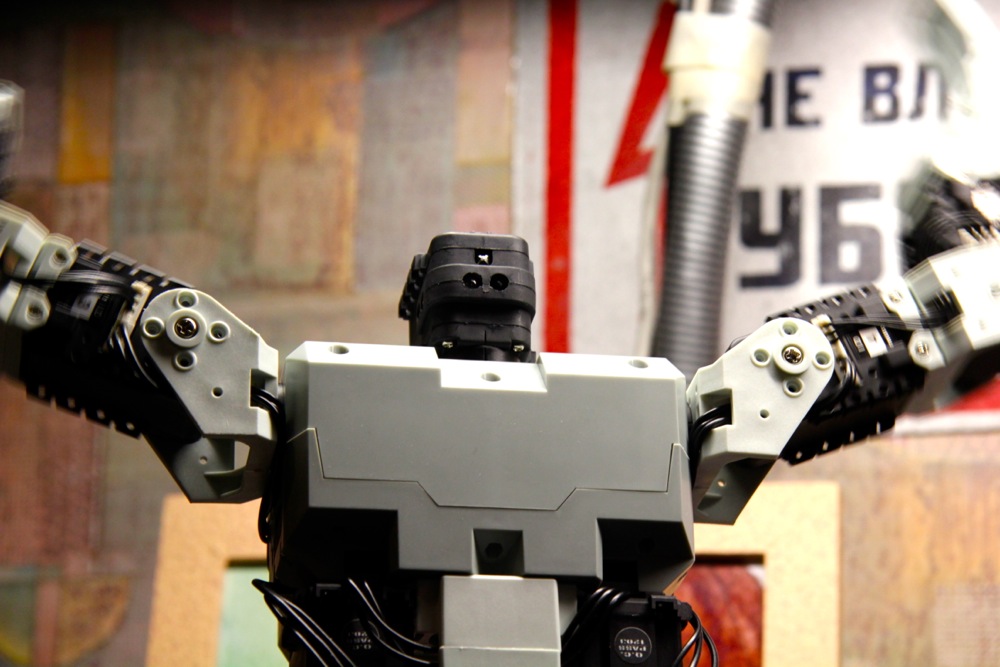
Почему-то это мне напомнило старые добрые демки с бессмысленным по сюжету, но завораживающим содержанием.
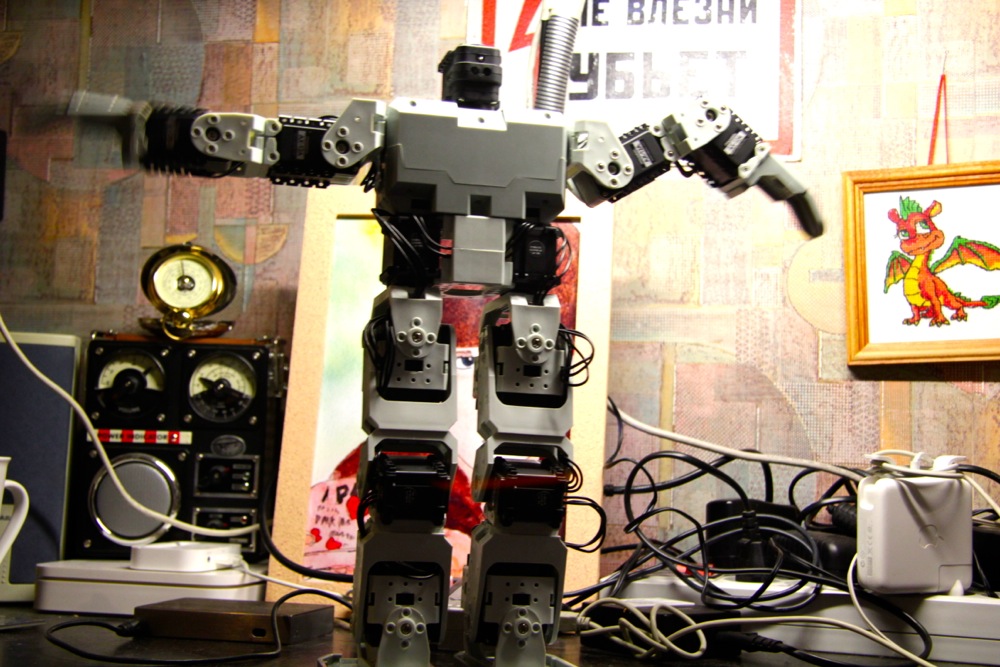


(Фотографии довольно бессмысленны для отображения движения, в видео ниже есть запись всех демопрограмм). Вторая демопрограмма — «приветствие», поклон по сенсору, махание руками по хлопку или щелчку. Третья — «боевая», робот встаёт в стойку и атакует с той стороны, с которой почувствует движение (слева, справа или спереди). Четвёртая — ходьба. Робот идёт очень стаибльно даже по скользкому полу. Кодинг идентичен тому, как работают BEAM-роботы, при обнаружении препятствия Биолоид отходит назад, поворачивается и продолжает идти. Пятая и последняя (больше просто нету кнопок, чтобы их триггировать) — робот ложится на спину, а по трём хлопкам или щелчкам переворачивается на другую сторону.
У терминатора есть соответствующий зарядник, двенадцать вольт и пять ампер. Зарядка довольно странная, не начинается до того, как была нажата кнопка U на контроллере.

Собранный гуманоидный Биолоид весит около 1900 граммов, уже не лёгкая категория, а центр средней (от 1 килограмма до трёх), очень популярной на соревнованиях. При лёгких модификациях робот мог бы вполне стать чемпионом и в автономном и в пилотируемых классах. (Для пилотируемого надо купить контроллер ZigBee и воткнуть в CM-5).

Подробное видео о гуманоидном Биолоиде.
За предоставление робота спасибо Сборкин.ру. Чуваки официально привезли Биолоидов в Россию, до этого робо-киты стандартного класса можно было добыть только через интернет или перепродавцов.
Теоретически робота можно собрать по частям (отдельно сервы, отдельно Мегу, отдельно сенсоры, отдельно крепления выпилить), но добиться такой целостности, особенно начинающим любителям робототехники, вряд ли удастся.
Биолоид выигрывает у своих конкурентов универсальностью, в один день это может быть гексапод, в другой гуманоид, а в третей неведомое нечто. И что самое удивительное, гуманоидная форма не слишком теряет от такой универсальности.
MMVIII–MMXXVI и далее. no generative ai used. no training generative ai on anything present here.cc-by-nc-nd 4.0.
